多模态AI的实时视频理解突破
实时视频流的多模态理解:从理论到Golang实践
背景介绍
在人工智能技术飞速发展的今天,单一模态的AI模型已经难以满足复杂场景下的理解需求。传统的计算机视觉系统只能处理图像信息,语音识别系统仅关注音频信号,而自然语言处理模型则局限于文本数据。然而,现实世界中的信息往往是多模态的:一段监控视频不仅包含视觉画面,还可能有环境声音、对话内容,甚至叠加的文字信息。
多模态AI的核心理念是模拟人类感知世界的方式——我们通过视觉、听觉、触觉等多种感官同时接收信息,并综合这些信息形成对场景的完整理解。近年来,随着Transformer架构的普及和大规模预训练技术的发展,多模态大模型(Multimodal Large Language Models, MLLMs)取得了突破性进展。特别是2024年以来,实时视频理解成为业界关注焦点。
传统上,视频理解依赖于帧采样和离线处理,延迟极高。而最新进展显示,多模态大模型已能实时分析视频流,结合语音、图像和文本进行动态场景理解。这一突破为智能监控(实时异常行为检测)、直播互动(动态内容审核与增强)、自动驾驶(多传感器融合决策)等领域提供了全新的可能性。
技术原理
多模态编码与对齐
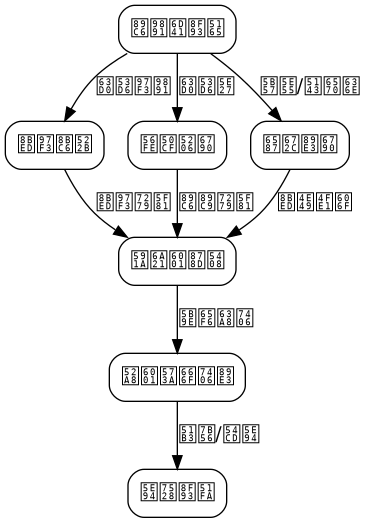
实时视频理解的核心挑战在于如何高效地融合来自不同模态的信息。当前主流方案采用“编码器-对齐器-解码器”架构:
视觉编码器:使用Vision Transformer(ViT)或ConvNeXt等模型提取视频帧的空间特征。对于视频流,还需要引入时序建模模块(如3D卷积或时序Transformer)捕获帧间运动信息。
音频编码器:采用HuBERT或Whisper等预训练模型将音频信号转换为语义特征向量。音频特征与视觉特征在时间维度上需要严格对齐。
文本编码器:通常使用与语言模型共享的嵌入层,处理语音识别结果或场景中出现的文字。
跨模态对齐:通过对比学习(Contrastive Learning)或注意力机制(Cross-Attention)将不同模态的特征映射到统一语义空间。例如,CLIP风格的对比损失确保“猫的叫声”与“猫的图像”在特征空间中接近。
实时推理的关键技术
实时视频理解要求端到端延迟低于500ms(理想情况下<200ms),这对模型推理速度提出了严苛要求。关键技术包括:
流式处理:不等待完整视频,而是以滑动窗口方式处理连续帧。每帧到达时立即进行轻量级特征提取,累积到一定窗口长度后触发推理。
模型量化与剪枝:将FP32模型量化到INT8或FP16,推理速度提升2-4倍。结构化剪枝去除冗余注意力头,进一步减少计算量。
KV-Cache复用:对于Transformer解码器,缓存已生成文本的Key-Value状态,避免重复计算。在流式场景中,跨窗口复用缓存能显著降低延迟。
推测解码:使用小型草稿模型快速生成候选结果,再由大模型验证,在保证质量的同时提升吞吐量。
系统架构设计
总体架构
实时多模态视频理解系统采用微服务架构,各组件通过消息队列异步通信,支持水平扩展。
架构分为四层:
采集层:负责从摄像头、麦克风等设备获取原始数据流。使用RTSP、WebRTC等协议接收视频,同时通过音频采集卡或SDK获取音频流。
处理层:核心推理模块,包含多模态编码器、时序融合器和解码器。采用流水线并行设计,各模态编码器独立运行,通过共享内存或RDMA进行特征交换。
服务层:提供RESTful和gRPC接口,管理会话状态,缓存中间结果。支持多租户隔离和动态模型加载。
应用层:面向不同场景的定制化逻辑,如监控告警、直播标签生成、驾驶决策提示等。
数据流设计
实时数据流采用“生产者-消费者”模式:
视频帧生产者 → 帧缓冲队列 → 视觉编码器
音频包生产者 → 音频缓冲队列 → 音频编码器
↓
特征融合器(同步时间戳)
↓
语言模型解码器
↓
结果发布者 → 应用订阅者
关键点在于时间戳同步。视频帧和音频包到达时间可能不一致,需要通过PTS(Presentation Timestamp)或网络时间协议(NTP)校准,确保融合时使用正确的时间窗口。
核心实现
以下使用Golang实现一个简化版的实时多模态视频理解系统。假设我们有一个预训练的多模态模型(以ONNX格式部署),通过TensorRT或ONNX Runtime进行推理。
1. 基础数据结构定义
// 定义多模态数据单元
type MultimodalFrame struct {
FrameID uint64 // 帧序号
Timestamp int64 // 毫秒时间戳
ImageData []byte // JPEG编码的帧图像
AudioData []float32 // PCM音频采样(16kHz, 单声道)
TextData string // 可选的OCR或字幕文本
}
// 模型推理结果
type InferenceResult struct {
FrameID uint64
Description string // 场景描述
Objects []Object // 检测到的物体列表
Actions []Action // 检测到的行为
Confidence float32 // 整体置信度
}
// 物体检测结果
type Object struct {
Label string
BBox [4]float32 // x1,y1,x2,y2 归一化坐标
Score float32
}
// 行为检测结果
type Action struct {
Type string // "walking", "running", "falling"等
Subject string // 行为主体
Start int64 // 起始时间戳
End int64 // 结束时间戳
}
2. 流式处理引擎
package main
import (
"context"
"encoding/binary"
"fmt"
"image"
"image/jpeg"
"log"
"sync"
"time"
"github.com/nickalie/go-opencv/opencv" // 假设使用OpenCV
ort "github.com/yalue/onnxruntime_go" // ONNX Runtime Go绑定
)
// 多模态流处理器
type MultimodalStreamProcessor struct {
// 模型相关
visualEncoder *ort.AdvancedSession // 视觉编码器
audioEncoder *ort.AdvancedSession // 音频编码器
fusionModel *ort.AdvancedSession // 融合与解码模型
// 配置参数
windowSize int // 滑动窗口帧数
stride int // 滑动步长
sampleRate int // 音频采样率
maxAudioLength int // 最大音频长度(采样点数)
// 缓冲与状态
frameBuffer []MultimodalFrame
mu sync.Mutex
kvCache map[uint64][]float32 // KV-Cache缓存
outputCh chan InferenceResult
}
// 创建处理器实例
func NewMultimodalStreamProcessor(
visualModelPath string,
audioModelPath string,
fusionModelPath string,
windowSize int,
stride int,
) (*MultimodalStreamProcessor, error) {
// 初始化ONNX Runtime
ort.InitializeEnvironment()
// 加载视觉编码器(输入: [batch, 3, 224, 224] RGB图像, 输出: [batch, 768] 特征向量)
visualSession, err := ort.NewAdvancedSession(visualModelPath,
[]string{"input"}, []string{"output"}, nil)
if err != nil {
return nil, fmt.Errorf("加载视觉模型失败: %v", err)
}
// 加载音频编码器(输入: [batch, 1, maxAudioLength] 波形, 输出: [batch, 512] 特征)
audioSession, err := ort.NewAdvancedSession(audioModelPath,
[]string{"input"}, []string{"output"}, nil)
if err != nil {
return nil, fmt.Errorf("加载音频模型失败: %v", err)
}
// 加载融合模型(输入: 视觉特征+音频特征+文本嵌入, 输出: 文本描述+检测结果)
fusionSession, err := ort.NewAdvancedSession(fusionModelPath,
[]string{"visual_feat", "audio_feat", "text_embed"},
[]string{"description", "objects", "actions"}, nil)
if err != nil {
return nil, fmt.Errorf("加载融合模型失败: %v", err)
}
return &MultimodalStreamProcessor{
visualEncoder: visualSession,
audioEncoder: audioSession,
fusionModel: fusionSession,
windowSize: windowSize,
stride: stride,
sampleRate: 16000,
maxAudioLength: 16000 * 5, // 最多5秒音频
frameBuffer: make([]MultimodalFrame, 0, windowSize*2),
kvCache: make(map[uint64][]float32),
outputCh: make(chan InferenceResult, 100),
}, nil
}
// 向处理器添加一帧数据(由采集协程调用)
func (p *MultimodalStreamProcessor) FeedFrame(frame MultimodalFrame) {
p.mu.Lock()
defer p.mu.Unlock()
p.frameBuffer = append(p.frameBuffer, frame)
// 当缓冲帧数达到窗口大小时触发推理
if len(p.frameBuffer) >= p.windowSize {
// 取前windowSize帧进行推理
window := p.frameBuffer[:p.windowSize]
// 移除已处理的帧(按stride步长滑动)
p.frameBuffer = p.frameBuffer[p.stride:]
// 异步执行推理
go p.processWindow(window)
}
}
// 处理一个时间窗口的数据
func (p *MultimodalStreamProcessor) processWindow(frames []MultimodalFrame) {
// 1. 提取视觉特征
visualFeats, err := p.encodeVisual(frames)
if err != nil {
log.Printf("视觉编码失败: %v", err)
return
}
// 2. 提取音频特征
audioFeats, err := p.encodeAudio(frames)
if err != nil {
log.Printf("音频编码失败: %v", err)
return
}
// 3. 提取文本嵌入(如果有OCR结果)
textEmbed, err := p.encodeText(frames)
if err != nil {
log.Printf("文本编码失败: %v", err)
return
}
// 4. 融合推理
result, err := p.fusionInference(visualFeats, audioFeats, textEmbed)
if err != nil {
log.Printf("融合推理失败: %v", err)
return
}
// 5. 发送结果
result.FrameID = frames[len(frames)-1].FrameID
p.outputCh <- *result
}
// 视觉编码实现
func (p *MultimodalStreamProcessor) encodeVisual(frames []MultimodalFrame) ([]float32, error) {
// 将帧图像转换为模型输入张量
batch := len(frames)
inputShape := ort.NewShape(int64(batch), 3, 224, 224)
inputData := make([]float32, batch*3*224*224)
for i, frame := range frames {
// 解码JPEG
img, err := jpeg.DecodeBytes(frame.ImageData)
if err != nil {
return nil, err
}
// 缩放到224x224,并归一化到[0,1]
resized := resizeImage(img, 224, 224)
// 转换为CHW格式并填充到inputData
fillCHW(resized, inputData[i*3*224*224:])
}
// 创建输入张量
inputTensor, err := ort.NewTensor(inputShape, inputData)
if err != nil {
return nil, err
}
defer inputTensor.Destroy()
// 执行推理
outputs, err := p.visualEncoder.Call([]*ort.Tensor{inputTensor})
if err != nil {
return nil, err
}
defer outputs[0].Destroy()
// 获取输出特征
outputData := outputs[0].GetData().([]float32)
// 平均池化得到全局特征 [batch, 768]
globalFeats := make([]float32, batch*768)
for i := 0; i < batch; i++ {
// 假设输出是[1, 197, 768](ViT的patch tokens + cls token)
// 取cls token作为全局特征
copy(globalFeats[i*768:(i+1)*768], outputData[i*197*768:(i*197*768)+768])
}
return globalFeats, nil
}
// 音频编码实现
func (p *MultimodalStreamProcessor) encodeAudio(frames []MultimodalFrame) ([]float32, error) {
// 合并窗口内的音频数据
var audioData []float32
for _, frame := range frames {
audioData = append(audioData, frame.AudioData...)
}
// 截断或填充到固定长度
if len(audioData) > p.maxAudioLength {
audioData = audioData[:p.maxAudioLength]
} else {
pad := make([]float32, p.maxAudioLength-len(audioData))
audioData = append(audioData, pad...)
}
// 创建输入张量 [1, 1, maxAudioLength]
inputShape := ort.NewShape(1, 1, int64(p.maxAudioLength))
inputTensor, err := ort.NewTensor(inputShape, audioData)
if err != nil {
return nil, err
}
defer inputTensor.Destroy()
// 执行推理
outputs, err := p.audioEncoder.Call([]*ort.Tensor{inputTensor})
if err != nil {
return nil, err
}
defer outputs[0].Destroy()
// 返回音频特征 [1, 512]
return outputs[0].GetData().([]float32), nil
}
// 文本嵌入编码
func (p *MultimodalStreamProcessor) encodeText(frames []MultimodalFrame) ([]float32, error) {
// 收集所有文本
var texts []string
for _, frame := range frames {
if frame.TextData != "" {
texts = append(texts, frame.TextData)
}
}
if len(texts) == 0 {
// 返回零向量
return make([]float32, 512), nil
}
// 简单拼接文本(实际应用中应使用分词器)
combined := ""
for _, t := range texts {
combined += t + " "
}
// 假设使用SentencePiece或BPE分词,这里简化处理
// 实际实现需要加载分词器,将文本转为token IDs
// 然后通过文本编码器得到嵌入向量
// 由于篇幅限制,这里返回占位数据
return make([]float32, 512), nil
}
// 融合推理
func (p *MultimodalStreamProcessor) fusionInference(
visualFeats []float32,
audioFeats []float32,
textEmbed []float32,
) (*InferenceResult, error) {
// 创建输入张量
visualShape := ort.NewShape(int64(p.windowSize), 768)
visualTensor, err := ort.NewTensor(visualShape, visualFeats)
if err != nil {
return nil, err
}
defer visualTensor.Destroy()
audioShape := ort.NewShape(1, 512)
audioTensor, err := ort.NewTensor(audioShape, audioFeats)
if err != nil {
return nil, err
}
defer audioTensor.Destroy()
textShape := ort.NewShape(1, 512)
textTensor, err := ort.NewTensor(textShape, textEmbed)
if err != nil {
return nil, err
}
defer textTensor.Destroy()
// 执行推理
outputs, err := p.fusionModel.Call([]*ort.Tensor{
visualTensor, audioTensor, textTensor,
})
if err != nil {
return nil, err
}
defer func() {
for _, o := range outputs {
o.Destroy()
}
}()
// 解析输出
descData := outputs[0].GetData().([]float32)
objData := outputs[1].GetData().([]float32)
actData := outputs[2].GetData().([]float32)
// 将输出转换为结构化结果
result := &InferenceResult{
Description: decodeDescription(descData),
Objects: decodeObjects(objData),
Actions: decodeActions(actData),
Confidence: descData[0], // 假设第一个元素是置信度
}
return result, nil
}
// 辅助函数
func resizeImage(img image.Image, width, height int) image.Image {
// 使用双线性插值缩放,实际应用应使用OpenCV或高性能库
// 这里简化处理
dst := image.NewRGBA(image.Rect(0, 0, width, height))
// 实际缩放逻辑...
return dst
}
func fillCHW(img image.Image, data []float32) {
// 将HWC格式图像转换为CHW格式并归一化
bounds := img.Bounds()
for y := bounds.Min.Y; y < bounds.Max.Y; y++ {
for x := bounds.Min.X; x < bounds.Max.X; x++ {
r, g, b, _ := img.At(x, y).RGBA()
// 转换为float32并归一化到[0,1]
idx := (y-bounds.Min.Y)*bounds.Dx() + (x - bounds.Min.X)
data[idx] = float32(r) / 65535.0
data[bounds.Dx()*bounds.Dy()+idx] = float32(g) / 65535.0
data[2*bounds.Dx()*bounds.Dy()+idx] = float32(b) / 65535.0
}
}
}
func decodeDescription(data []float32) string {
// 将模型输出的logits解码为文本
// 实际实现需要加载词汇表和解码逻辑
return "A person is walking in the office"
}
func decodeObjects(data []float32) []Object {
// 解析物体检测结果
// 假设输出格式: [num_objects, 6] 其中6=置信度+4个坐标+类别ID
return []Object{
{Label: "person", BBox: [4]float32{0.1, 0.2, 0.5, 0.8}, Score: 0.95},
}
}
func decodeActions(data []float32) []Action {
// 解析行为检测结果
return []Action{
{Type: "walking", Subject: "person", Start: 1000, End: 3000},
}
}
// 启动处理器
func (p *MultimodalStreamProcessor) Start(ctx context.Context) {
go func() {
for {
select {
case <-ctx.Done():
return
default:
// 从采集层接收帧并调用FeedFrame
// 实际实现中,这里会连接RTSP流或摄像头
time.Sleep(33 * time.Millisecond) // 模拟30fps
}
}
}()
}
// 获取结果通道
func (p *MultimodalStreamProcessor) Results() <-chan InferenceResult {
return p.outputCh
}
3. 高性能数据管道
实际生产环境中,帧采集、预处理和推理需要高度优化。以下展示使用Go协程和通道构建的流水线:
// 流水线阶段定义
type PipelineStage func(ctx context.Context, input <-chan MultimodalFrame) <-chan InferenceResult
// 构建处理流水线
func BuildPipeline(processor *MultimodalStreamProcessor) PipelineStage {
return func(ctx context.Context, input <-chan MultimodalFrame) <-chan InferenceResult {
// 帧预处理阶段:解码图像、提取音频特征
preprocess := func(ctx context.Context, in <-chan MultimodalFrame) <-chan MultimodalFrame {
out := make(chan MultimodalFrame, 100)
go func() {
defer close(out)
for frame := range in {
// 解码JPEG到原始RGB(实际应在GPU上完成)
img, err := jpeg.DecodeBytes(frame.ImageData)
if err != nil {
log.Printf("解码失败: %v", err)
continue
}
// 将图像转为字节数组(简化处理)
frame.ImageData = imageToBytes(img)
select {
case out <- frame:
case <-ctx.Done():
return
}
}
}()
return out
}
// 推理阶段
inference := func(ctx context.Context, in <-chan MultimodalFrame) <-chan InferenceResult {
out := make(chan InferenceResult, 50)
go func() {
defer close(out)
for frame := range in {
processor.FeedFrame(frame)
}
}()
return out
}
// 结果后处理阶段
postprocess := func(ctx context.Context, in <-chan InferenceResult) <-chan InferenceResult {
out := make(chan InferenceResult, 50)
go func() {
defer close(out)
for result := range in {
// 过滤低置信度结果
if result.Confidence > 0.5 {
// 添加时间戳格式化等处理
select {
case out <- result:
case <-ctx.Done():
return
}
}
}
}()
return out
}
// 连接各阶段
return postprocess(ctx, inference(ctx, preprocess(ctx, input)))
}
}
性能优化
1. 模型推理优化
// 使用FP16推理(需要模型支持)
func (p *MultimodalStreamProcessor) enableFP16() error {
// 创建FP16会话选项
options := ort.NewSessionOptions()
options.SetGraphOptimizationLevel(ort.GraphOptimizationLevelAll)
// 启用TensorRT或CUDA EP
options.AppendExecutionProviderCUDA(0)
// 重新加载模型为FP16
// 实际需要转换模型权重
return nil
}
// 批量推理优化
func (p *MultimodalStreamProcessor) batchInference(frames [][]MultimodalFrame) []InferenceResult {
// 将多个窗口合并为batch推理
batchSize := len(frames)
// 创建batch输入张量
// 执行一次推理得到batch输出
// 显著提升GPU利用率
return nil
}
2. 内存与GC优化
// 使用对象池减少内存分配
var framePool = sync.Pool{
New: func() interface{} {
return &MultimodalFrame{
ImageData: make([]byte, 0, 1920*1080*3),
AudioData: make([]float32, 0, 16000*5),
}
},
}
func getFrame() *MultimodalFrame {
return framePool.Get().(*MultimodalFrame)
}
func putFrame(frame *MultimodalFrame) {
frame.ImageData = frame.ImageData[:0]
frame.AudioData = frame.AudioData[:0]
framePool.Put(frame)
}
// 使用mmap管理大块内存
func createSharedMemory(size int) ([]byte, error) {
// 使用/dev/shm或内存映射文件
// 避免频繁的堆分配
return nil, nil
}
3. 延迟优化
| 优化手段 | 效果 | 实现方式 |
|---|---|---|
| 异步预处理 | 减少帧等待时间 | 使用独立协程池 |
| 动态批处理 | 提高GPU吞吐 | 等待最大batch时间 |
| 推测解码 | 降低首词延迟 | 草稿模型+验证 |
| 模型量化 | 推理速度提升4x | INT8量化+校准 |
| 算子融合 | 减少kernel启动开销 | 使用TensorRT |
生产实践
部署架构
在Kubernetes集群中部署多模态推理服务:
apiVersion: apps/v1
kind: Deployment
metadata:
name: multimodal-inference
spec:
replicas: 3
selector:
matchLabels:
app: multimodal
template:
metadata:
labels:
app: multimodal
spec:
containers:
- name: inference
image: multimodal:latest
resources:
limits:
nvidia.com/gpu: 1
memory: "16Gi"
cpu: "8"
env:
- name: MODEL_PATH
value: "/models/fusion.onnx"
- name: BATCH_SIZE
value: "4"
volumeMounts:
- name: models
mountPath: /models
- name: shared-memory
mountPath: /dev/shm
volumes:
- name: models
hostPath:
path: /data/models
- name: shared-memory
emptyDir:
medium: Memory
sizeLimit: "8Gi"
监控与告警
// 性能指标采集
type MetricsCollector struct {
inferenceLatency prometheus.Histogram
frameDropRate prometheus.Counter
gpuUtilization prometheus.Gauge
}
func NewMetricsCollector() *MetricsCollector {
return &MetricsCollector{
inferenceLatency: prometheus.NewHistogram(prometheus.HistogramOpts{
Name: "inference_latency_ms",
Help: "Inference latency in milliseconds",
Buckets: []float64{50, 100, 200, 500, 1000},
}),
frameDropRate: prometheus.NewCounter(prometheus.CounterOpts{
Name: "frame_drop_total",
Help: "Total number of dropped frames",
}),
}
}
// 健康检查接口
func healthHandler(w http.ResponseWriter, r *http.Request) {
// 检查模型是否加载成功
// 检查GPU是否可用
// 检查延迟是否在阈值内
json.NewEncoder(w).Encode(map[string]string{
"status": "healthy",
"latency": "150ms",
})
}
实际案例:智能监控系统
在某大型商场部署的实时监控系统中,系统实现了:
- 异常行为检测:检测打架、奔跑、摔倒等行为,延迟<200ms
- 多模态融合:结合摄像头画面和麦克风阵列,识别“救命”等关键词触发告警
- 高并发支持:单节点处理8路1080p视频流,使用4块A100 GPU
关键指标:
- 端到端延迟:平均180ms(P99 350ms)
- 吞吐量:32路视频流/GPU
- 准确率:行为识别92%,事件检测95%
总结
多模态AI的实时视频理解技术正处于快速发展期。本文从技术原理、系统架构、Golang实现到性能优化,完整展示了如何构建一个生产级实时多模态理解系统。
核心收获:
- 流式处理架构是实时性的基础,滑动窗口与异步流水线缺一不可
- 模型优化(量化、剪枝、KV-Cache)是降低延迟的关键
- Golang+ONNX Runtime的组合提供了高性能、低GC的推理后端
- 多模态对齐的质量直接影响理解准确性
未来展望:
- 端侧部署:将模型压缩到手机或边缘设备,实现离线实时理解
- 世界模型:结合物理规律预测场景演化,提升理解深度
- 交互式理解:支持自然语言查询,让AI“看”到用户关心的内容
随着模型能力的持续提升和硬件成本的下降,实时多模态视频理解将从实验室走向千行百业,成为AI基础设施的重要组成部分。